MineStar Command

Hace 2 años que Finning, Caterpillar y Codelco han estado de la mano trabajando para automatizar la operación subterránea en la mina Esmeralda de la división El Teniente, conocida por ser la mina subterránea más grande del mundo. El proyecto que comenzó en 2017 con las denominadas pruebas “Alpha” ha finalizado su fase de implementación y pruebas y está preparado para operar este año.
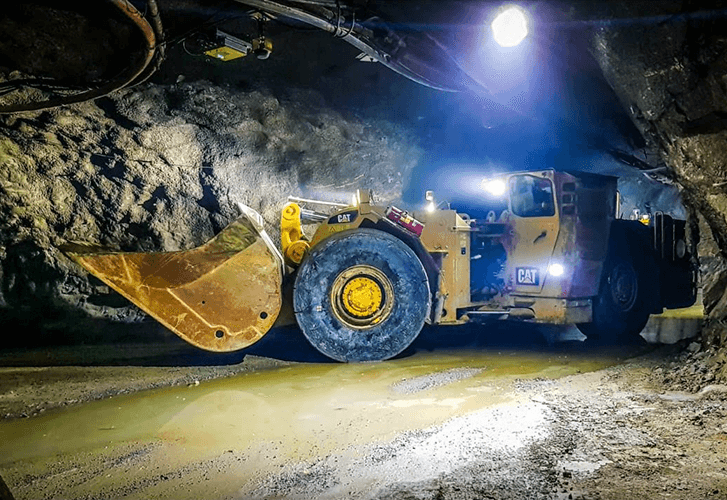
Las pruebas “Alpha”, realizadas bajo los 6.000 metros de caminos subterráneos de la mina, consisten en la operación remota de dos cargadores frontales de bajo perfil (LHD), equipados con un sistema de tecnología a bordo que se comunica a través de una red de comunicaciones hacia una sala de control. Dicho procedimiento permite visualizar y grabar el entorno, detectar objetos, evitar colisiones, y enviar datos sobre los signos vitales de la máquina a la sala de operación, desde donde el operador puede manejar el equipo a kilómetros de distancia.
“En el único momento que el operador interviene en el proceso, desde la sala de operación, es para realizar la carga del mineral. El equipo luego opera de forma autónoma, realizando el traslado desde el punto de extracción hasta el punto de vaciado, donde realiza la descarga del mineral, para luego retornar al punto de extracción. Por eso, el proyecto se denomina de semi-autonomía y no de autonomía propiamente tal”, explica la jefa del proyecto por parte de FinningCat, Sandra Ibarra.
Una revolucionaria tecnología, cuyo principal objetivo es aumentar la seguridad sacando al operador del equipo, evitándole problemas de salud y subiendo los estándares en materia de seguridad laboral.
Además, “este proyecto logro comprobar que este sistema de operación semiautónomo significa una mejora en la productividad y mayor optimización de los procesos, ya que los operadores podrán monitorear más de una máquina a la vez, con lo cual se pueden igualar o sobrepasar los rendimientos actuales de una operación manual”, agrega Martin Pierola, Gerente Comercial de Minería Subterránea de FiningCat.
Este proyecto involucró cuatro etapas: desarrollo de ingeniería, implementación del sistema en terreno, entrega de 65 requerimientos técnicos, y la validación funcional del sistema (medición KPI). Etapas que concluyeron el 31 de enero pasado de forma satisfactoria, y que este año será sometido a un régimen de operación normal, con el objetivo de medir su máximo desempeño.